
CAN bus Logger/Dashboard (ongoing)
CAN bus broadcast logger with GUI on NXP
S32K144 (Cortex-M4) board for a racing vehicle (FSAE) ECU. Implemented in C/C++ with FreeRTOS.
CAN bus Logger/Dashboard (ongoing)
CAN bus broadcast logger with GUI on NXP
S32K144 (Cortex-M4) board for a racing vehicle (FSAE) ECU. Implemented in C/C++ with FreeRTOS.
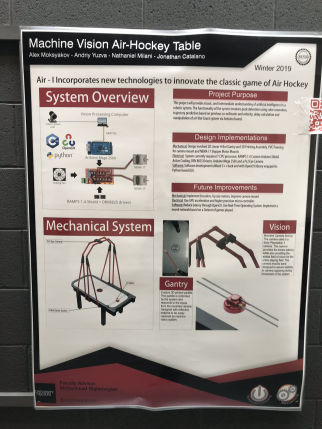
AI Airhockey Table (Capstone)
A strategy state machine and control system for 2 axis stepper motor H-gantry robot, implemented on a microcontroller. Integration with vision processing computer (Linux) via UART
protocol. Design and assembly of power supply circuit for stepper drivers, microcontroller and cooling fans.
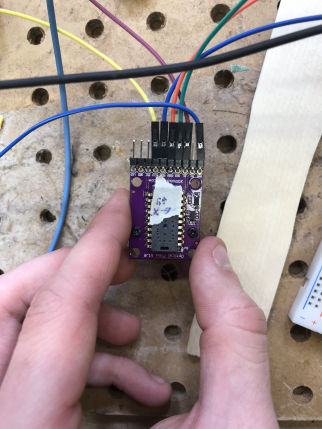
Slip Angle Sensor
ATmega microcontroller and ADNS-3080 optical flow sensor integrated via SPI. The sensor flow readings are converted into slip angle and
interfaced with vehicle ECU for logging.
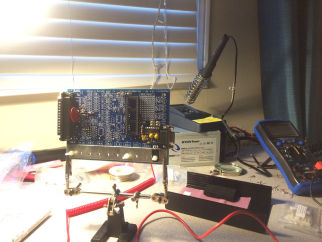
ECU PCB Assembly
Assembly and testing of a standalone ECU.